![]()

THOR
AC MOTOR CONTROLLER DFC (DIRECT FLUX CONTROL)
INVERTER
450A RANGE
INVERTER
AC Induction motor controller with an innovative software DFC (DIRECT FLUX
CONTROL) provides:
- High peak Torque
- Responsive and accurate closed-loop speed and torque control.
- Optimal response to load variations.
- Easily adaptable to match motors characteristics.
Same controller can be employed to control pump or traction by special setting.
|
|
|
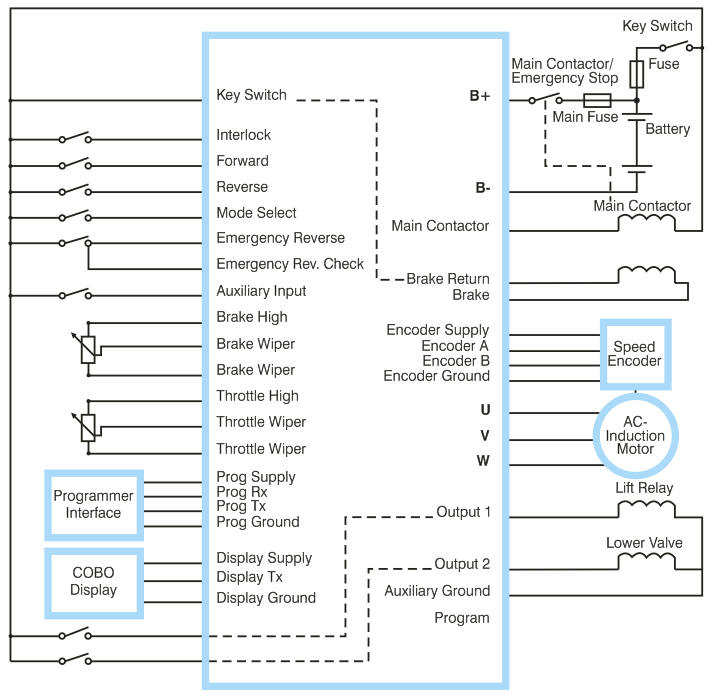
WIRING DIAGRAM |
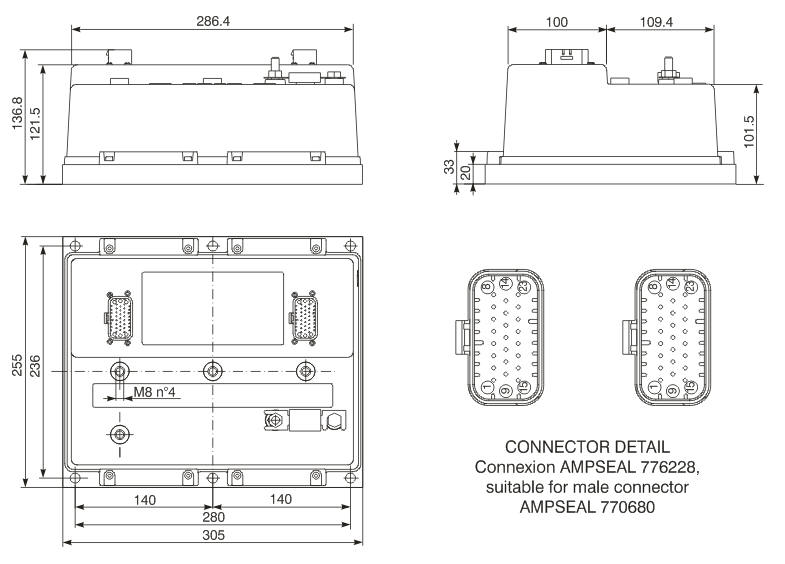
| TECHNICAL DATA | |
| Mechanical dimensions | 255 x 305 x 140 mm |
| IP rating | IP54 |
| Standard voltage supply | 80Vdc |
| Max current | 450Arms |
| Continuous power | 12KW |
| Switching rate | 8KHz |
| Environment temperature | -40°C; +40°C |
| Cutback temperature cooler | 75°C |
| Digital inputs | (HV) 10 |
| Analog inputs | 2 |
| Encoder | 1 ( two possible interfaces ) |
| Power outputs | 2 |
FUNCTIONAL AND OPERATIVE FEATURES
Serial port
- RS422
This interface enables to set or change the characteristical parameters of the
Controller by an innovative program for PC and
to directly extract telemetry data allowing customized systems.
- CAN BUS
This enables to acquire signals from appropriate control boards and to send
custom messages to the display.
DSP programming features through serial port or Can Bus increase flexibility of
the controller.
- OUTPUT 12V
Auxiliary services 12v output
- ENCODER
Interface for motor speed sensor set for ENCODER used in electric power traction.
- POWER OUTPUTS (2)
These outputs are normally used by main contactor or electromagnetic brake and
can easily be used for other functions.
Both protected from short-circuits and overloads
- MOTOR HEAT
Interface for (On/OFF) thermal switch sensor to protect motor in case of
overheat or short-circuit.
- DIGITAL INPUTS (10)
These inputs can be used to pilot controller features in alternative to CAN BUS.
Each single input is fuse protected and all inputs
can be set for any function of the vehicle.
- ANALOG INPUTS (2)
Normally used to manage potentiometer dedicated to throttle and brake pedal.
HARDWARE CHARACTERISTICS
DC BUS
CIRCUIT:
Detects continuously voltage supply faults (overvoltages) protecting correct
controller operation.
- BATTERY CIRCUIT:
Checks battery state and conditions.
- MOTOR CIRCUIT:
Verifies correct motor connection (all 3 phases on) before enabling start
sequence.
- CONTACTOR CIRCUIT:
Controls status of main contact and contactor coil
- ENVIRONNEMENT TEMPERATURE SENSOR:
Fitted on the control board and samples continuously temperature inside the
inverter.
- TEMPERATURE SENSORS ON POWER MODULS:
Temperature of each three power modules with I.M.S technology is constantly
detected
to ensure controller protection against overheating.
- DEAD TIME CORRECTION:
Ensures optimal drive in any condition reducing stress due to harmonic
distortion
PROGRAMMING FEATURES
CAN BUS:
Ensures communication with COBO display through custom messages and monitors
main parameters.
- PC PROGRAMMABLE
Appropriate programs for normal PC enable to manage the entire system, set
parameters, acquire telemetric data, upload
and download parameters' files.
- RAMP POGRAMMABLE FUNCTIONS:
THOR controller allows a full setting of following parameters: acceleration,
deceleration, brake, reverse as well as S type ones,
modifying easily and quickly the dynamic operations of the controller.
- CUSTOMIZED USER SETTING (4):
User can select one of four operation modes to optimize vehicle run.
SAFE AND RELIABILITY
Safe
operating thanks to multilevel protection:
- Hardware controls all critical alarms and directly operates system protection.
This ensures total protection in case SW part is damaged.
- Hw watchdog operates through digital high power processor and manages alarms
detected by Hw
and monitors constantly their status to detect failures.
- SW manages re-setting of normal operation deleting alarm signal only if
failure conditions have been completely removed.
- Power can be anytime cut by contactor and all signals are protected by a
fuse
to ensure safe conditions of the inverter in any condition
Reliable
operation thanks to start diagnostics:
Before power to motor, Controller diagnostics the system activating
following control sequence:
1- Diagnostic of internal service power supply.
2- Precharge of capacitors bank
3- System controls
3 Motor connection
3 Protection diagnostics
3 Correct preload
3 Battery Status
4- Close main contactor
5- Start up power circuits
Motor and
system protection:
Any problem that could harm motor and/or system efficiency causes
system protection intervention. If the problem is not serious,
Thermal Derating procedure is activated
(performance decreases until security conditions are reached),
if not the controller activates automatic shutdown procedure.
CAN BUS communication system with the Display supplies all indications
to user concerning failure situation and gives in clear
simple instructions about recovery.
ADVANTAGES
As
alternative to a CC motor, DFC THOR inverter gives the opportunity to
employ low cost asynchronous motor with squirrel-cage rotor, resistant and
maintenance free. Furthermore thanks to our DFC system it's not necessary to
oversize these motors to obtain adequate torque power supply.
DFC THOR inverter is ideal for particular operating conditions where, in case of
motors with low nominal power, high torque supply for short periods (much more
than nominal torque) is needed. Practically this means that in case of equal
power
features, a smaller motor is required, therefore increasing traction battery
life,
resulting in more competitive.
Thanks to a patented DFC algorithm, optimal performances are reached almost
independently from correct setting of parameters. This means that start up
doesn't
require particular calibration but is carried out with same simple setting as
for a
CC motor.
EXAMPLE of an application with electrical traction:
The size of an electric motor is normally made depending on the required torque
to
move the vehicle but, once running, the vehicle needs far lower torque.
Another typical problem is the instability due to decreasing flux that occurs
when
climbing: speed reduces significantly because the torque needed to drive uphill
is
reached only at a far lower speed compared to maximum speed. Also in such cases,
this phenomena leads to an oversizing of motors that can be avoided thanks to
DFC flux, by calibrating motor size to the average of torque needed and not
based
on peak values.
Using a cheaper motor, involves a reduction in weight and overall size as well
as
power consumptions, and obtaining a lower inertia which corresponds to a quick
responsive motor feedback.
APPLICATIONS
DFC Inverter
is particularly studied
for fitting on:
- FORK LIFTS for control of traction,
motor pump and/or hydraulic lifting pump.
- GOLF CARS
- AIRPORT ELECTRICAL VEHICLES
- ELECTRICAL VEHICLES FOR CITY CENTRES
OR WITH LIMITED TRAFFIC.
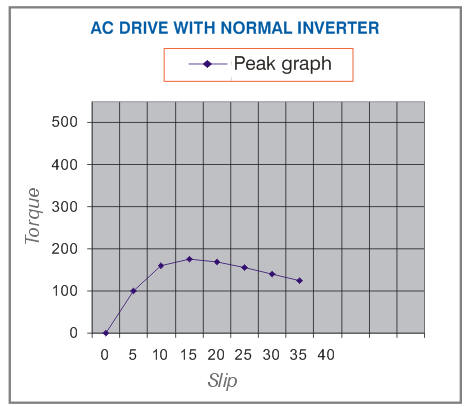
| COMPARED PERFORMANCES | |
INVERTER NORMALE: NORMAL INVERTER: Limited max Torque: Max torque of an AC motor normally reaches rates between 1.5 to 2 times nominal torque, therefore to give an example, a motor that has, for a nominal torque equal to 160Nm, can reach a max torque of 320Nm. Speed decrease: Maximum torque is never reached when motor is at maximum speed, but is only reached when motor speed reduces (decreasing flexure). |
 |
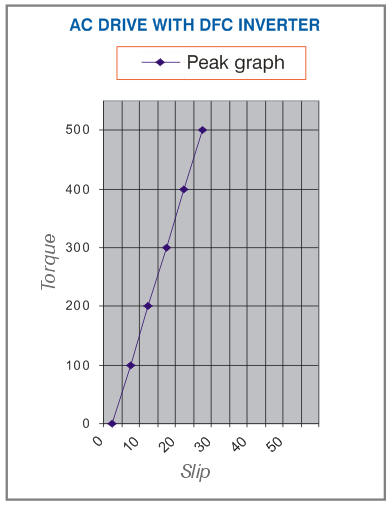
| INVERTER DFC THOR: Unlimited Torque (theoretical): DFC algorithm provides an adequate compensation of inductive motor parameters effects so that torque can increase in linear rate compared to motor rotation speed ensuring greater torque features. Smooth speed: DFC algorithm increases the flux (and consequently max torque), enabling speed to remain nearly constant with effort or load variation. |
 |